Prepare head tracking utility
Install the latest version of the 3D Global View Optimizer software and allow the installation of the camera driver.
Prepare OctoNus Stereo Viewer program
For OctoNus Stereo Viewer starting from version 4.8.18.69
- Run the OctoNus Stereo Viewer installer.
- Select the corresponding display by its size or ID on the second page:
The display ID is located on the back side of the display. It looks like 05F, 05D, S1D or similar. At the end of the installation process the installer will try to run the registry file that is necessary for autostereoscopic display. Press “Yes” to install the registry file and finish installation:


Configure autostereoscopic display with ID that is not one of: 05F, 05D, S1D, 05G
To configure new autostereoscopic display that is not integrated into the OSV installer (05F, 05D, S1D, 05G) you should receive from 3d-global company:
- the viewmap bitmap file;
- integer number of native views;
- registry file
Then:
- Install OSV with any autostereoscopic configuration (i.e. 13" S1D)
- Run the registry file that is provided by 3d-global.
- Copy the viewmap bitmap file to the "%PROGRAMDATA%\OctoNus Software\Digital Microscope" folder.
- Open the file "%PROGRAMDATA%\OctoNus Software\Digital Microscope\autostereoscopic_display.xml" and change:
- NativeViewsNumber to the value provided by 3d-global
- IndexMap: sum of zeros and ones count should be equal to NativeViewsNumber * AngleDenominator. So, if NativeViewsNumber is 6, we specify IndexMap as 15 zeros and 15 ones. Change IndexMap in two places in this config.
- ViewMapPath: change its value to the new viewmap filename without path.
Adjust autostereoscopic visualization to reach best stereo quality
If the stereo on your workstation is configured incorrectly, you will not be able to see a volumetric image via the Oсtonus Stereo Viewer app: ghosting will be very noticeable, left and right pictures will not be combined into one 3D image etc.
Adjust stereo in head tracking mode
To configure autostereoscopic visualization with head tracking, you should do the following:
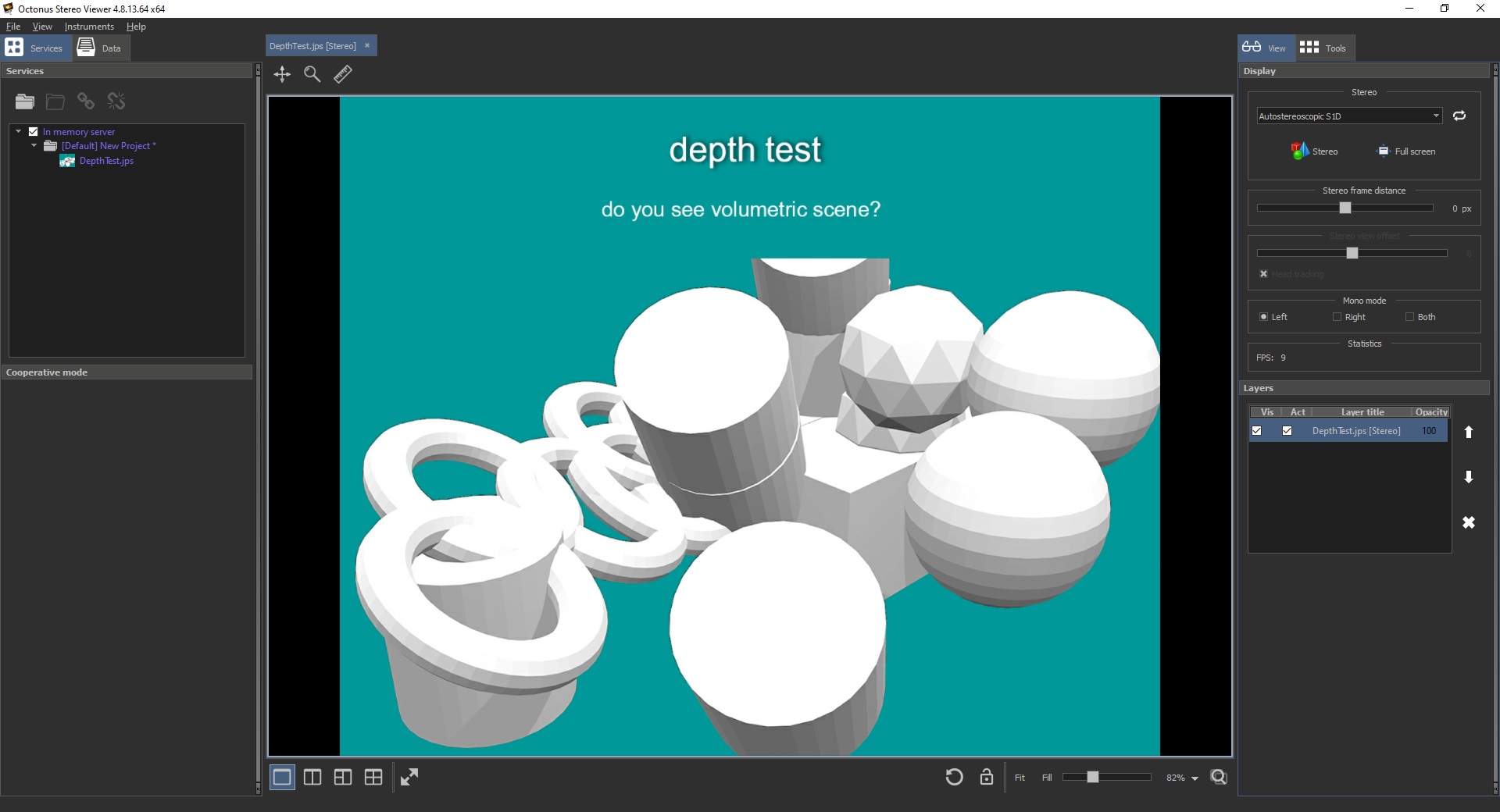
- Run Octonus Stereo Viewer on regular display
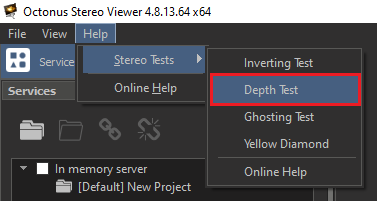
- Open a stereo test, for example, the Depth Test (Main menu: Help → Stereo Tests → Depth Test)
- Activate AutostereoscopicS1D full screen mode with checked Head tracking flag (how to do this, see here steps 3 to 6)
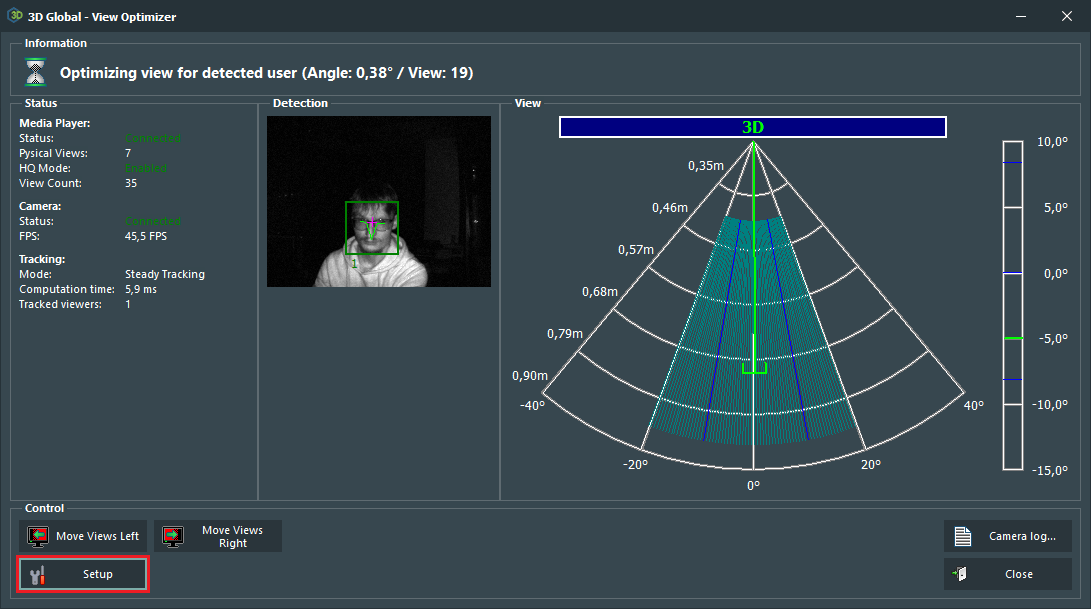
- Open 3D Global View Optimizer. Check with the app if there is head tracking when you are at the right distance from the autostereoscopic display (eyes about 70 cm from the screen):
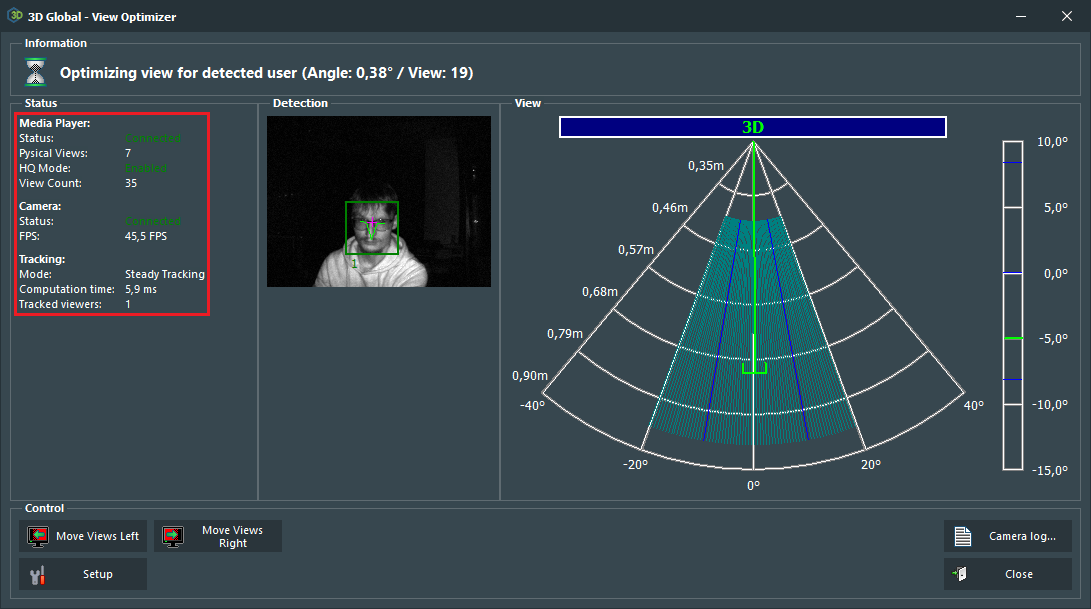
Also, please check these parameters:- Media Player status is connected
- HQ mode is enabled
- Camera is connected
- FPS ≥ 35
- Tracking mode is steady tracking
- If another tracking mode is selected, please follow these additional steps:
- Click the Setup button
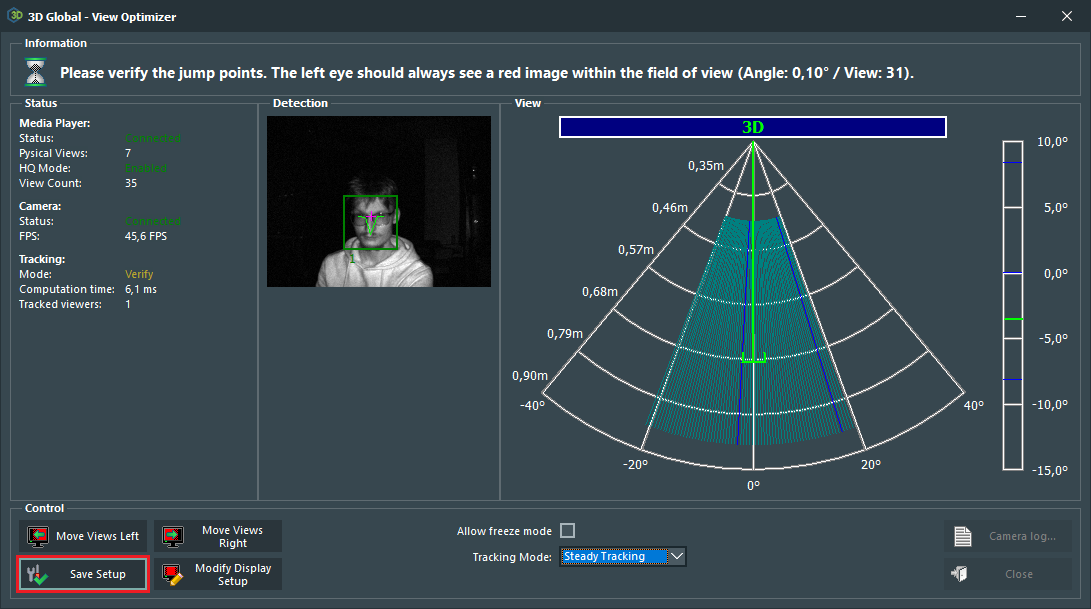
- Select the Steady Tracking item from the list of available tracking modes
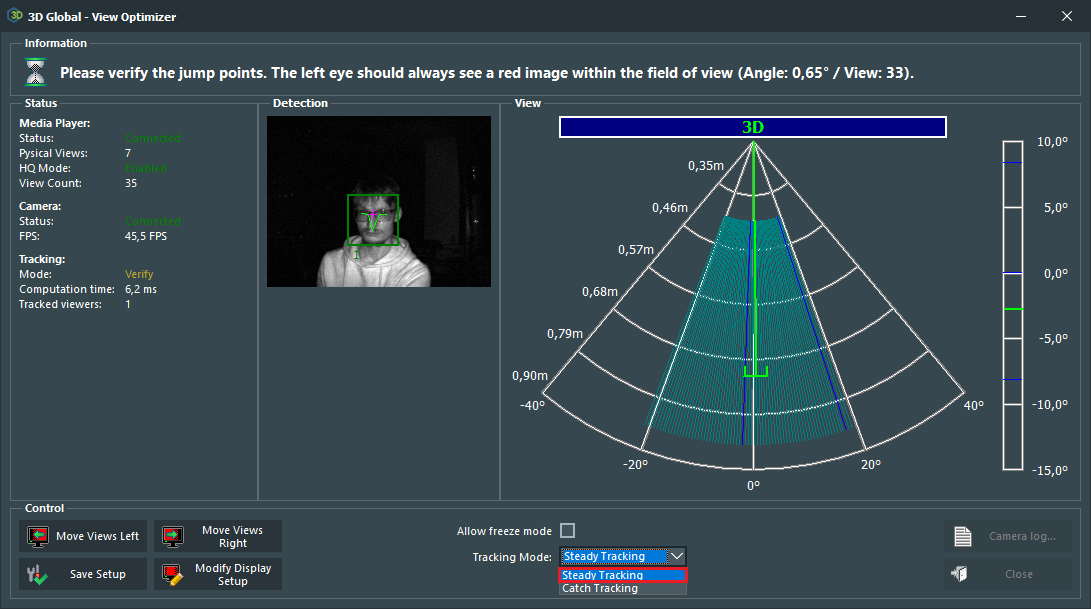
- After that click the Save Setup button
- Adjust the View offset to see the right stereo using the Move Views Left and Move Views Right buttons:
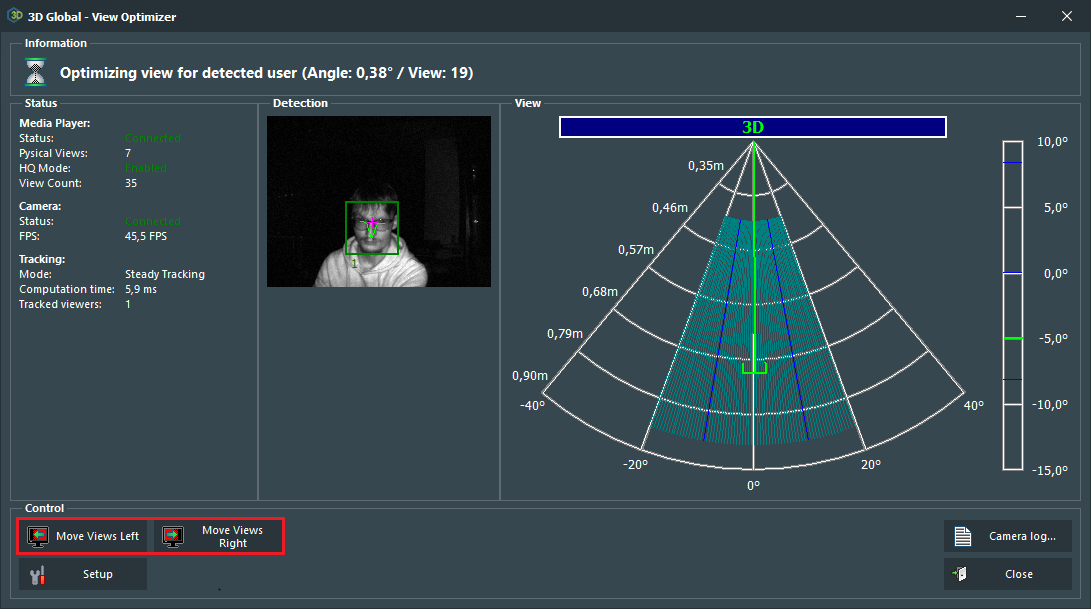
- Click the Setup button
Adjust stereo in mode without head tracking
Procedure is the same, but:
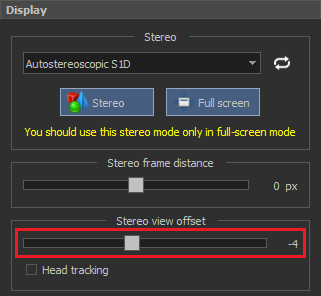
- Uncheck "Head tracking" checkbox in the OSV
- Adjust stereo view using the appropriate slider in the Octonus Stereo Viewer application or Ctrl+Alt+Left / Ctrl+Alt+Right shortcuts and do not use Move Left / Move Right buttons in the 3D Global View Optimizer: